Projects
Dyna Gym
Dyna Gym is a python package implementing Reinforcement Learning algorithms in non-stationary environments supported by the OpenAI Gym toolkit.
Flatland
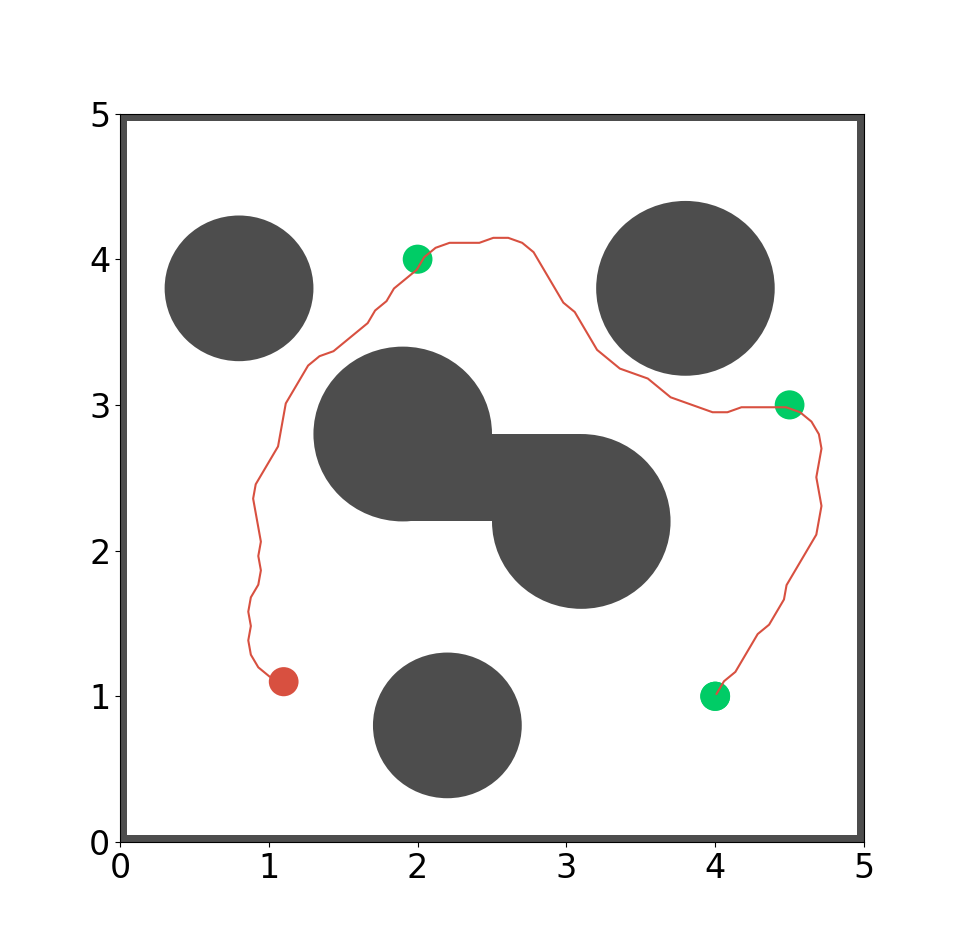
Flatland is a C++ library for navigation tasks in 2D environments. The settings enable the use of different policies, environments and action spaces. Choice of state space is also made available so that the agent can either evolve within a discrete gridworld or a continuous-state world.
Learning2Fly
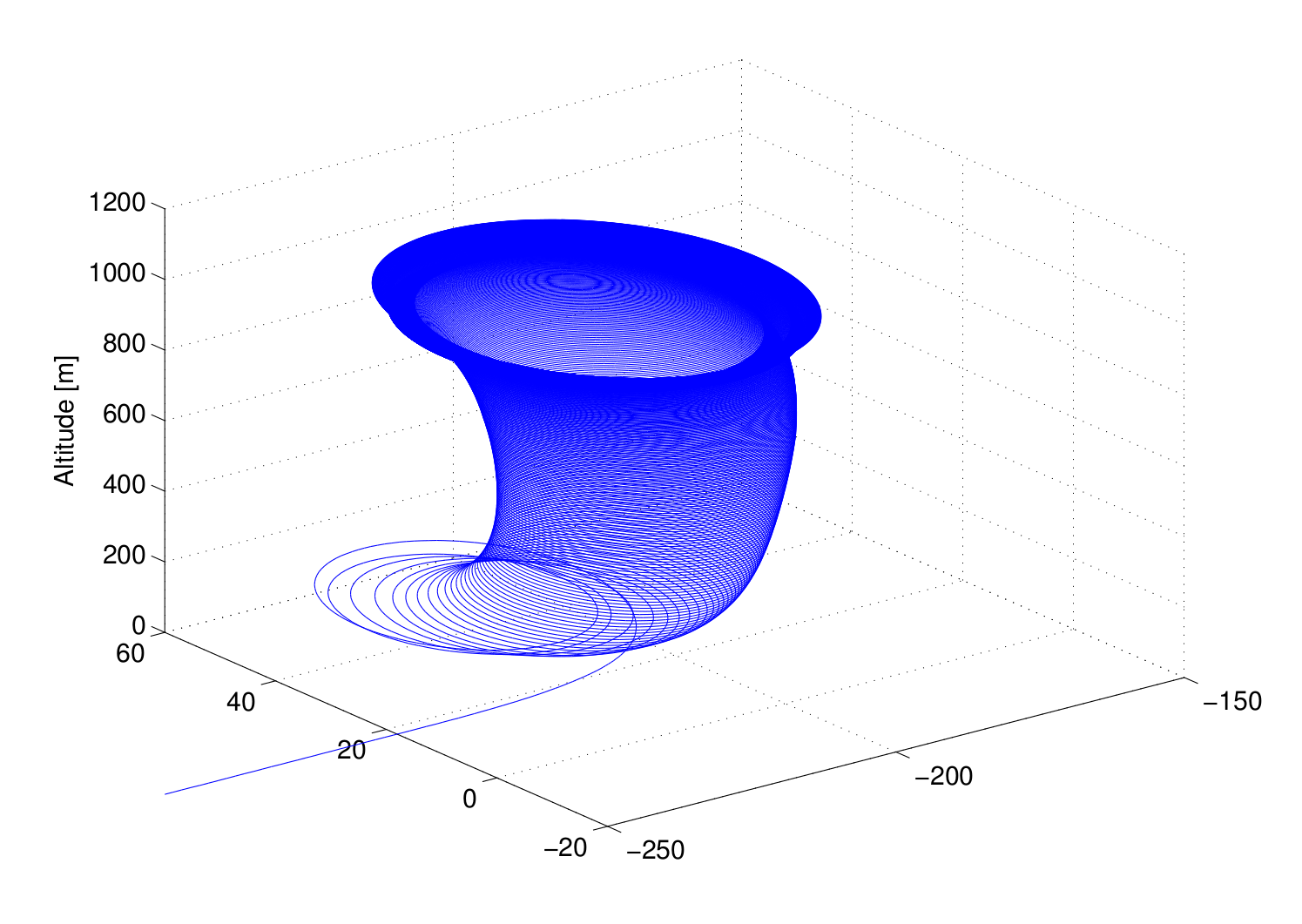
Learning2Fly is a C++ library simulating the flight of a glider UAV within a non-stationary atmosphere featuring thermal currents. The used dynamics model is borrowed from Beeler et al. 2003.
Traveler
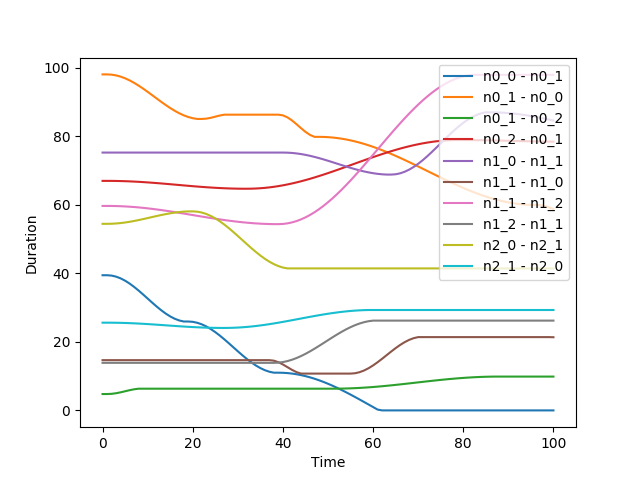
Traveler is a graph-based non-stationary MDP simulating travels between waypoints. Each node of the graph represents a location and each edge a route between locations. The travel duration corresponding to an edge is time-dependent, making the environment non-stationary. The goal of an agent is to reach a unique termination node as quickly as possible.